Olá caros amigos, abaixo o banner do Desafio de Robótica Aplicada. Monte sua equipe, participe e ganhe prêmios!



MECABOT - Robô Explorador de Ambientes; Clique e veja mais.

Ambiente de interação homem-máquina; Clique e veja mais.

Salvador Norte Shopping, Salvador - BA.
Projeto Interdisciplinar ARHTE - 2012.2.

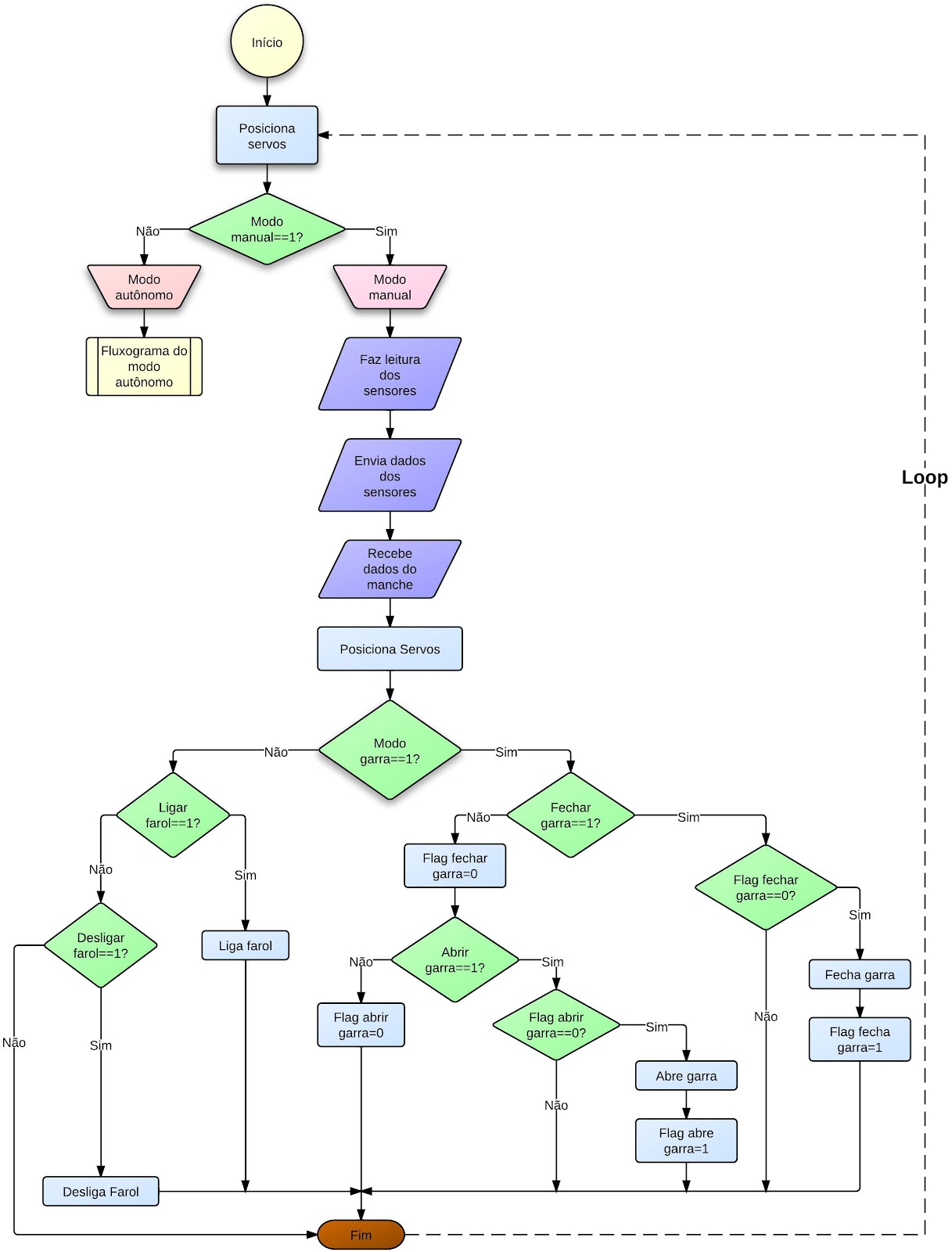
Robô Explorador de Ambientes.






 |
| Software Mecabotcontroller |


















 |
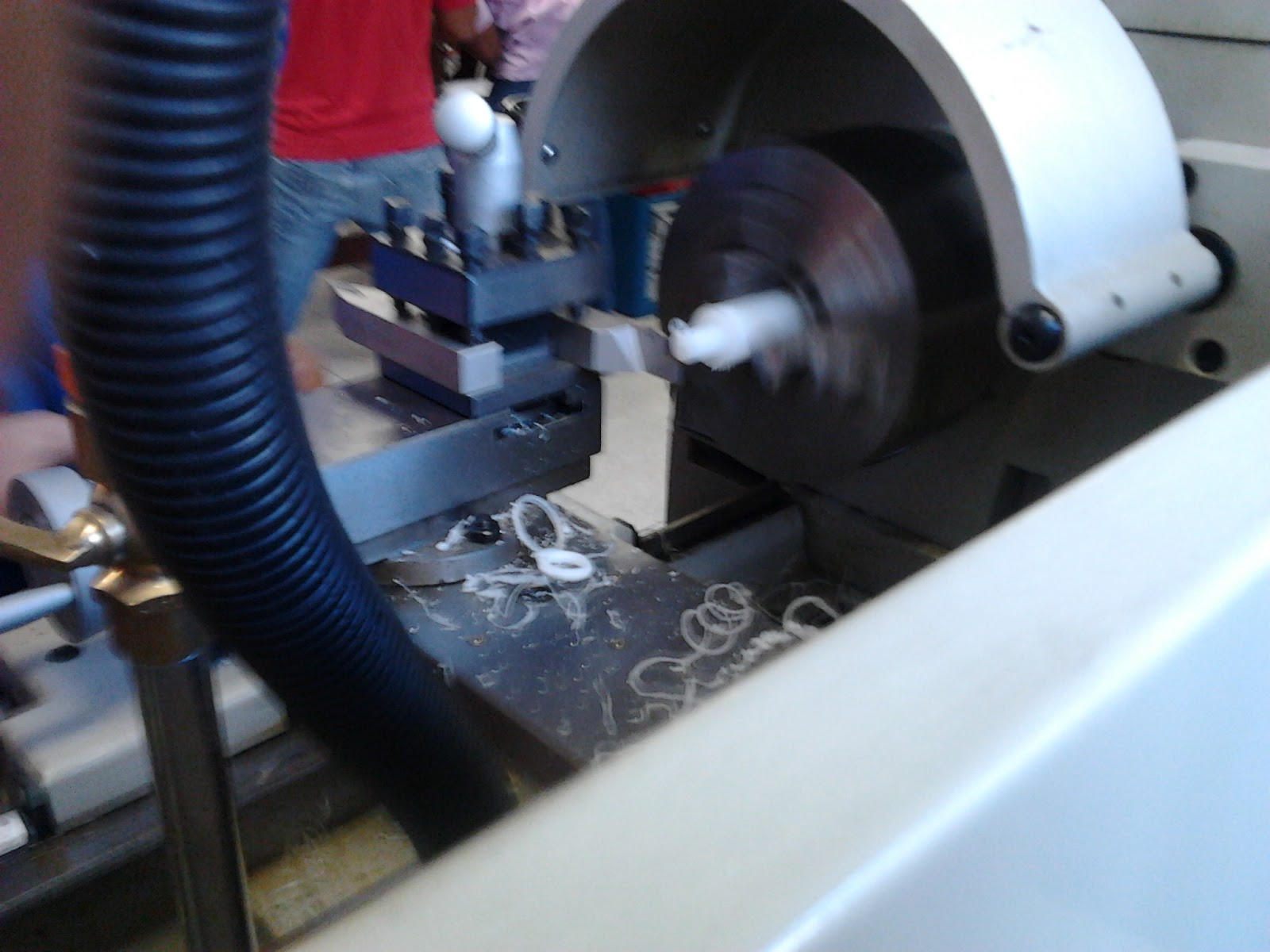
| Esboço 3D da peça. |




 |
| Jadson Sampaio e Rodrigo Ícaro. |





































